导读2022年2月9日整理发布:人类已经建造了能够举起非常重的物体并轻松移动它们的起重机。我们还设计了大型船舶,可以毫不费力地将大型重型货物
2022年2月9日整理发布:人类已经建造了能够举起非常重的物体并轻松移动它们的起重机。我们还设计了大型船舶,可以毫不费力地将大型重型货物运送数千英里。但是,如果我们想表演一些看起来不那么壮观的东西怎么办?如果目标是围绕一个不太重,甚至很小但需要非常小心处理的物体移动怎么办?
这可以是任何东西,从稀有的艺术品到昂贵的精密制造机器。它也可能是一件普通的事情,比如举起一个你想从一个碗转移到另一个碗的蛋黄。处理这些物体的问题在于它们非常脆弱,施加错误的压力几乎肯定会损害它们的结构完整性并可能破坏它们。
这正是北卡罗来纳州立大学 (NCSU)的一组研究人员一直试图解决的问题。他们的解决方案是受剪纸启发的新一代机器人抓手,可以抬起易碎物体而不会造成伤害。
夹具如何工作?
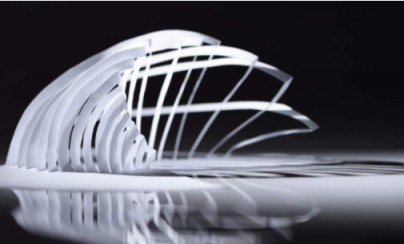
新的抓手设计灵感来自的剪纸艺术,类似于更著名的折纸艺术折纸;它涉及切割 2D 材料并将它们变成 3D 形状。
研究人员声称,这种受剪纸启发的将 2D 物体转换为机器人抓手的方法比以前用于设计机器人抓手的方法“相当”简单。此外,使用多个狭缝的巧妙想法也让研究人员可以轻松定制生成的 3D 对象的形状。在 YouTube 视频中,研究人员展示了他们的基本抓手原型如何毫不费力地举起多个物体——包括蛋黄和人发。
研究人员还揭示了他们的剪纸抓手与现有替代品有何根本不同。NCSU 的剪纸抓手不是试图通过对物体施加压力来抓住它,而是完全取消了抓握部分,而是在提起物体之前将其包裹起来。